Motor planning
Despite the infinite number of possible movements that could be used to achieve a task, humans and other animals show highly stereotypical trajectories.
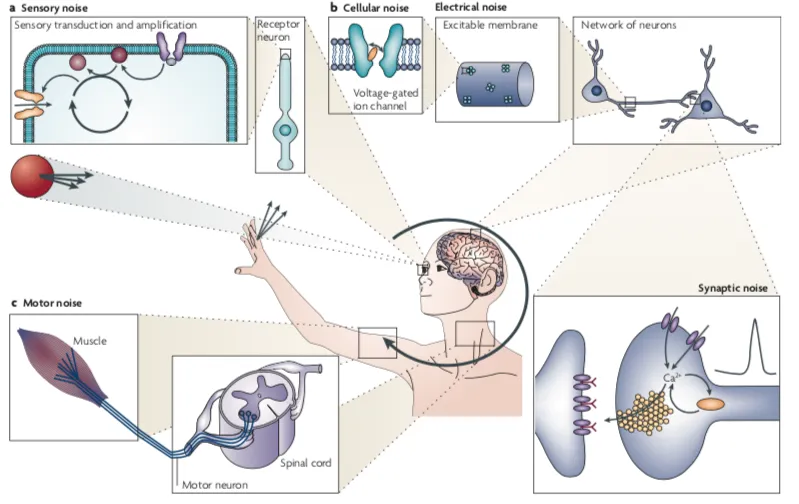
We have investigated the computational mechanisms that transform a task into a particular motor action. We hypothesized that a particular type of stochasticity, signal-dependent motor noise, is a key constraint when planning an action. Motor noise leads to variability of our actions, such as the spread of darts when we try to hit the bullseye. We developed a theory based on the physiological principle that neural control signals are corrupted by noise whose variance increases with the size of the control signal and that planning aims to minimize the deleterious effects of such noise. Based on this principle we developed an optimal control theory of motor planning for goal-directed eye and arm movements. This theory provides a simple and powerful unifying perspective for movement control (Harris and Wolpert, 1998; Harris and Wolpert, 2006). This idea formed a key component of the theory of Optimal Feedback Control (OFC) developed by others in which planning consists of setting time-varying feedback gains that minimize the cost of a movement, which is typically a tradeoff between accuracy and effort.
We have shown that reflexes measured during movement are consistent with several features of optimal feedback control theory (Dimitriou et al., 2012; Franklin et al., 2012; Dimitriou et al., 2013; Franklin et al., 2014; Diamond et al., 2015) and that the these reflex feedback gains evolve prior to movement in parallel with decision variables (Selen et al., 2012). Our recent work has shown that motor planning does more than simply minimize the expected cost in that there is a risk-sensitive component that trades off the expected cost with the variability in the cost (Nagengast et al., 2010; Nagengast et al., 2011; Nagengast et al., 2011). The quality of the sensory feedback during a movement can depend substantially on the generated movement. We have shown that by incorporating such state-dependent sensory feedback, the optimal solution now incorporates active sensing and is no longer a pure feedback process but includes a significant feedforward component, a prediction validated experimentally (Yeo et al., 2016). We have also provided evidence that the CNS simultaneously plans multiple parallel movements allowing it to co-optimize motor plans so as to reduce working memory demands (Gallivan et al., 2015; Gallivan et al., 2016; Gallivan et al., 2016).