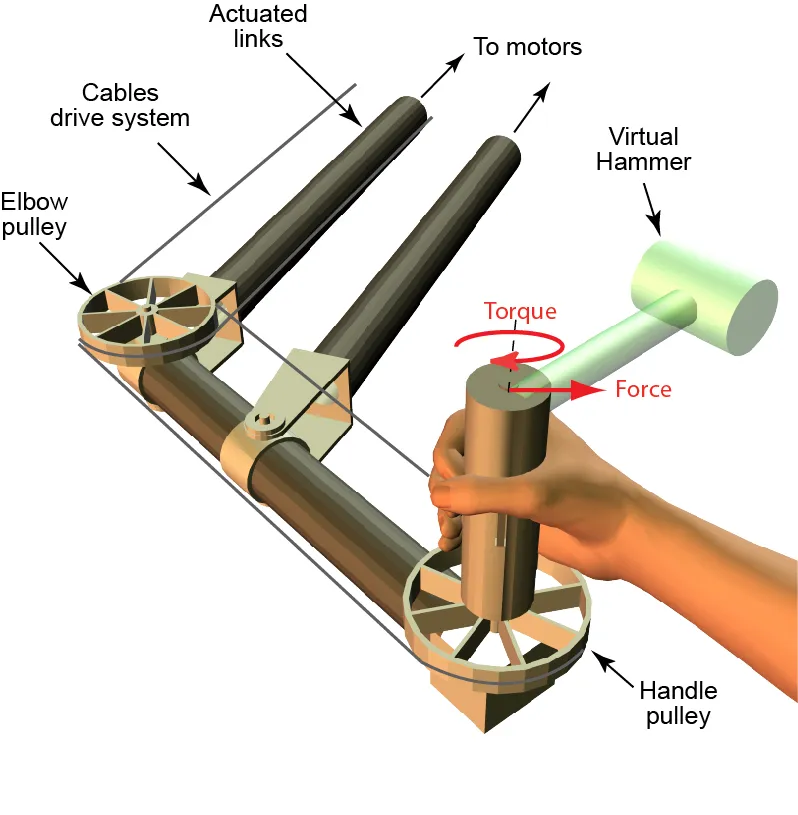
The requirements are that the interfaces must have low inertia and friction, and rigidity to allow us to simulate objects and dynamics faithfully. We have developed both two- and three-degree of freedom interfaces (vBOT & 3BOT) integrated with peripersonal virtual workspaces. This provides the high degree of control that is needed to investigate computational theories of planning and learning (Howard et al., 2009). Our robotic interfaces are used in numerous labs around the world.